The European research project »SYMBIO-TIC«which started on April 1st with a term of four years aims at developing solutions for a new working environment in which the collaboration of humans and robots plays a significant role. Indeed, the new generation of robots allows more cost-effectiveness and competitiveness for the industry. However, there are several challenges like the lack of adaptability, flexibility and vertical integration preventing wider use of automated solutions, especially in the manufacturing industry. Therefore, the project partners, coming from industry as well as research institutes, will provide technologies to enhance the cooperation of humans and robots.
The project aims at a novel hybrid assembly/packaging ecosystem in a dynamic factory environment. It focuses especially on industries that are rather robot-reluctant and where current tasks and processes are perceived to be too complex to be automated. The new system will offer solutions for automating also these demanding use cases. It will be context-aware in task planning and execution, safe to human workers in a shared fenceless working space, flexible and adaptive to dynamic changes, and cost-effective.
Human-robot-collaboration for the factories of the future
In order to compete with the global market, the European industry must be able to respond to the market’s needs like dynamic changes or deviations on shop floors, manufacturing complexity and dynamism and also a quicker time-to-market. A wider use of automated solutions will help face these needs, but the solutions must be more flexible and adaptable. Referring to this, a key factor is the immersive and symbiotic collaboration between human workers and robots. This collaboration benefits from the machine’s power and repeatability as well as from the worker’s accuracy and flexibility.
For implementing such a human-robot tight collaborative system, four objectives will be addressed by the project partners: (1) Offering safety to human workers all time when interacting with robots in a shared fenceless working space. An active collision avoidance system will ensure this safe collaboration. (2) Generating who-do-what work plans on the fly suitable for human-robot mixed tasks. They should consider different aspects like the current availability, cost-effectiveness, or long-term sustainability. (3) Developing adaptable and easily controllable robots with zero programming for robot users. (4) Devising multimodal interfaces for the information exchange between worker and robot and for instructing the worker on what to do or how to do something effectively. To approach these challenges for new robotic systems, the SYMBIO-TIC project partners will especially work on technologies based on smart sensors (visual, auditory, haptic, etc.) and self-adaptive decision algorithms.
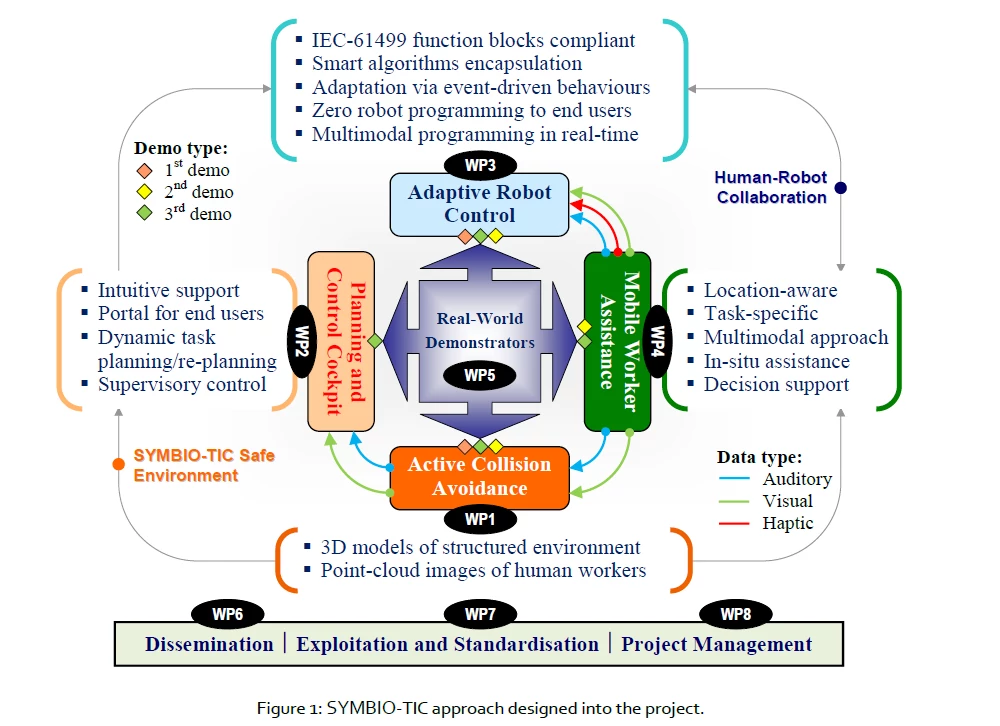
Figure 1 gives an overview of the main goals of SYMBIO -TIC as well as the work packages.
Validation in near-real industrial settings
The project’s final goal is to test and quantify the aforementioned four objectives in terms of safety, feasibility, intuitiveness, adaptability and scalability of collaboration between humans and robots. Hence, a test-bed will be developed to showcase the envisioned technologies, innovations and competitiveness in this project. Furthermore, three demonstrators placed in three European Member States are planned: in food-processing, aeronautic and automotive industries each. The three industries have been chosen for several reasons. First, they represent industries of lower (food-processing) and higher complexity (engine assembly in automotive). Also, the whole industry (food-processing) or parts of it (engine assembly) are robot-reluctant but could benefit from more automation. Lastly, the project members want to cover a wide scope as they address system integrators as well as end users.

Figure 2 shows a use-case in the aeronautic that will be chosen for a demonstrator.

The test-bed and the demonstrators will help provide evidence that the project’s innovations are realizable onsite, so that the project’s expectations of Technology Readiness Level 5-7 will be matched. During the three years, the project partners will bring the technologies from TRL 5 to TRL 7 for ready scale-up to industrial applications in real production environment after the completion of the project. The overall progress of SYMBIO -TIC will be measured every twelve months in special Key Performance Indicators (KPIs).
About Amorph Systems
Amorph Systems provides long-term experience as IT supplier for automation solutions in the manufacturing industry and contributes state-of-the-art solutions for advanced planning, forecasting and optimization.
Amorph Systems merges all its expertise and knowledge in a Manufacturing Prediction and Forecasting software platform. A modern SOA and web service based, modular architecture builds the solid basis of the Amorph Planner & Scheduler. The integrated workflow engine enables Amorph Systems to reduce the project implementation time and cost and helps to perfectly adapt application functionalities to the customer needs. A further strength of Amorph Planner and Scheduler is the easy connection of all kind of automatically or manually driven equipment and robots to the Amorph Planner & Scheduler via pre-configured equipment interfaces.
For more information about the project please visit:
